We have participated in some robot contests. 5 times in Robotex and twice in Baltic Robot Sumo. Robotex has so far had different tasks every year bot not so in 2010.
Robotex 2010 - football
It was a dissappointment. In every sense. The task was the same as last year. Only minor changes in the rules were made in favour of image processing.
This year we started building the robot 5 days before deadline. Before that time we had no intention of going so no preparations had been made.
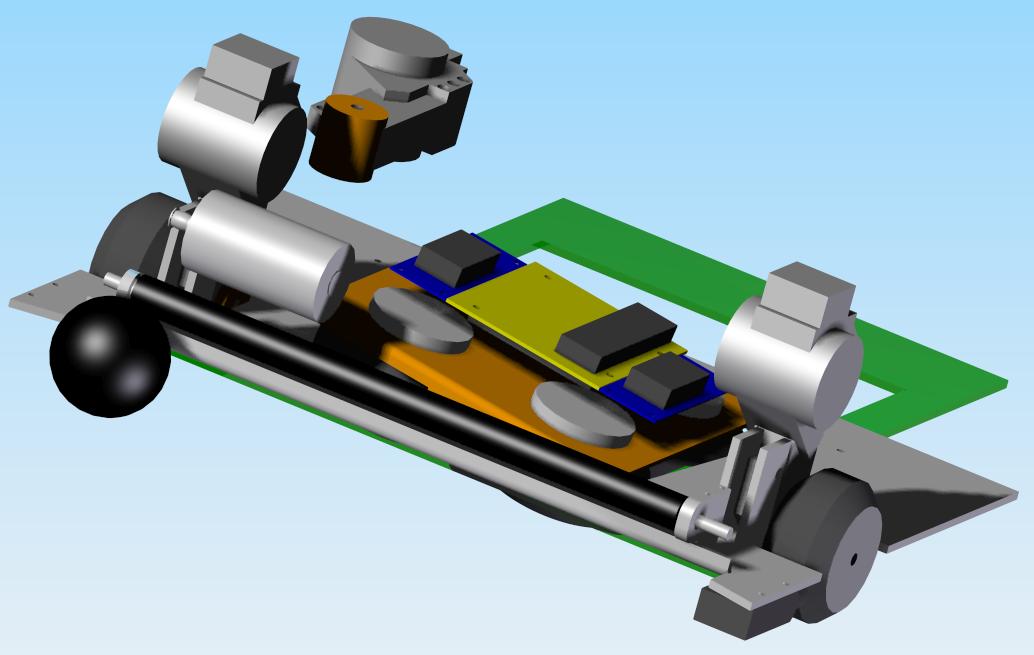
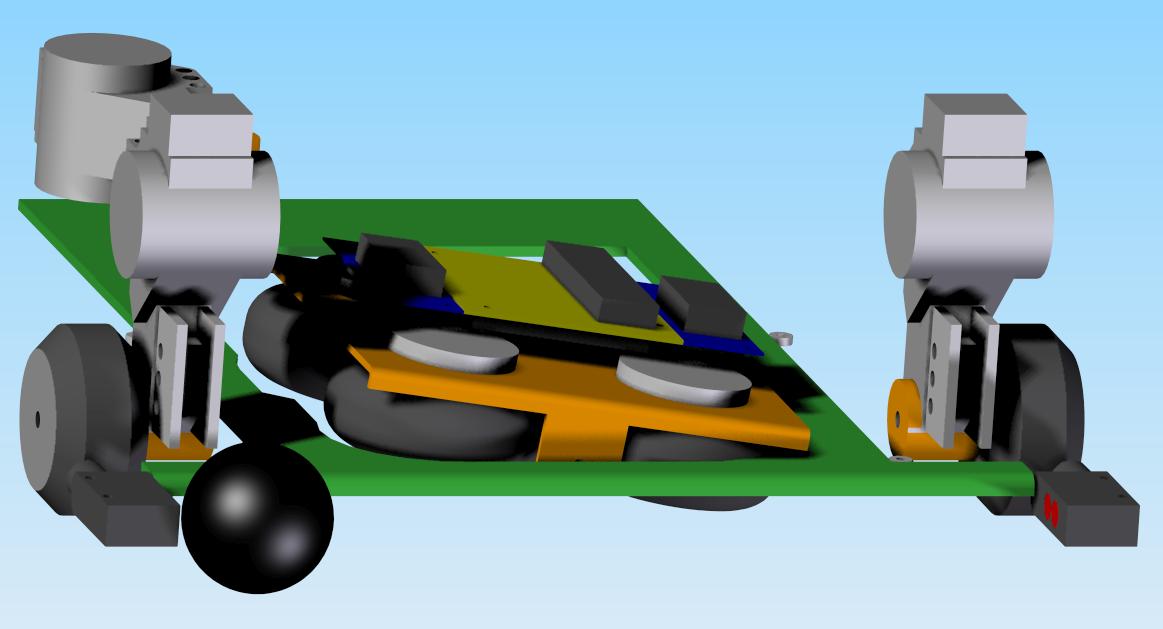
It was a good run. Tough lesson on proper planning and work distribution in limited time. From the drawings You can see that the blueprints were detailed except power, control and little thing between third motor and kicking sledge. That little thing also was supposed to tilt the kinetic energy reserve between firing and retracting positions. Turned out that the devil lies in details. We never got the damned thing working. By manually turning the motor it worked randomly 1 time out of 5.
4AM we arrived at the scene after doing an all-nighter and driving 260km. Installing power and controls was easy. LEGO NXT was programmed and trigger kept failing - this is what You get when trying to control several simultanous movements with one motor. At qualifications it turned out that the robot was oversized - misinterpretation of rules. This had to be corrected and time was wasted. For movement some tactics was improvised but it was our time to compete before we had any chance to test anything. Download cable was practically ripped off during the run to the field. It was a positive surprise that wheels turned in right direction. No kicking unfortunately. Kicking routine had been left in test mode. Opponent scored but at wrong gate so we won the round.
Attempt was made to improve kicking. We got rid of the heavy kinetic energy storage and improvised something similar to the last year. This ruined the balance and one wheel was not contributing at all anymore due to slippage. Game over. The opponent was just as advanced as our robot so both teams got disqualified.
Lessons learned:
There's no point to compete with unfinished result - if it's not ready two weeks before deadline then it will never be ready.
Functional is better than original. The kicking mechanism was one of the kind but still total failure.
Having LEGO minimizing controller building does not mean that it is a suitable controller for the task. One motor and complicated mechanics was trying to do the work of two motors and several sensors. If there would have been plenty of time to generate ideas and try different approaches then one motor solution may have been a good way to improve reliabilty and ease the programming but the problem became appearant at last evening before competition. The trigger could not be tested before all the other subsystems were assembled.
Robotex 2009 - football
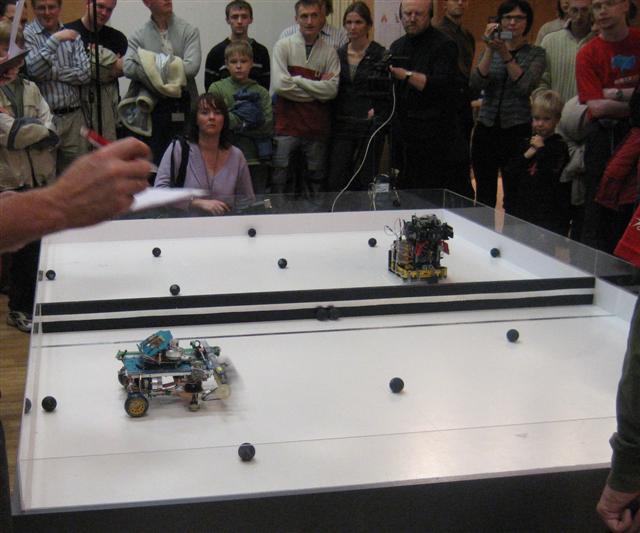
Two robots and 10 golf balls. Main strategies were image processing and believing in blind luck. Our strategy was to get at least one point (blind luck). We got 7-10th place out of 19 teams. Robot number was 2.
Lessons learned:
Tasks are favouring image processing. We need to acquire neccessary competence.
The organization of the competition was the best so far - something to learn from.
Baltic Robot Sumo 2009 Klaipeda Autumn Cup
We thought of reusing some previous effort from spring competition. 21-22 place out of 26 participants, robot nr. 15.
Lessons learned:
Exceptionally bad organizing.
GPS is driver's best friend. We followed fellow estonians when going through Riga.
It is not neccessary to pariticipate to learn your place - taking part from local precompetition would have sufficed.
Baltic Robot Sumo 2009 Tallinn Spring Cup
Our first attempt in this new strange field. We built 2 robots in 500g category. Our ambition was to toughen the competition by winning at least one competitor. End result was 2 points. Robot numbers were 4 and 11.
Lessons learned:
Although Sumo is about friction and not about electronics, still our 6-wheel version robot performance suffered from simplistic electronics.
CAD drawing really helps. The result had very tight tolerances and small clearances.
Simple is elegant. LEGO robot had weight problems so finally only ultrasonic range finder was used and it enabled very good control. The other had 8 sensors and was still oblivious to the opponent.
All wheel drive does not guarantee good friction. Flexible hull, 6 wheels and 8 motors sound good but robot flexed over the side and the weight dragged the rest of it also over.
Robotex 2008 - cleaning of the room
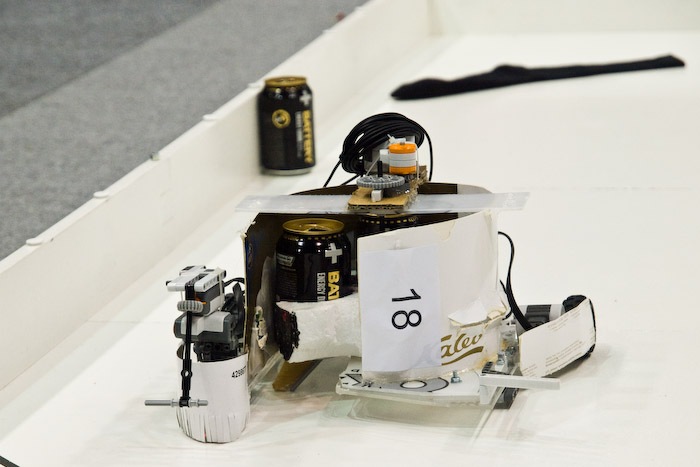
Relatively complex task if the goal is to win. We made our goal to participate. Minimum goal was to go straight line and collect everything in the way. Deadline forced us to use commertially available base - LEGO NXT. Robot nr. 18. 4th place and special prize for smartest robot.
Lessons learned:
Commercial solution enables fast results but it's no silver bullet. We had to use TAKEX professional sensors instead of LEGO original and it happened on the night before competition.
Participating is a good effort. Half of the competitors had been on the field at one time and no-one had earned any points on the first round. Foolproof plan of earning one point sounded as very good plan at that point.
Robotex 2007 - rope climbing
Stability was also required although the competiton was about speed. We participated with 2 robots. Nr. 10 and nr. 18. - 5th and 4th place respectively. We were only ones using 3 DPDT relays as central processing unit.
Lessons learned:
We had clear goal due to the fiasko from the last year - robot had to be ready two weeks before the competition or we will not enlist! This approach worked well although we found out that stopping mark on the rope was not electrically conductive on trial competition at our milestone deadline.
Rebuilding of stopping sign sensors was obvious thing to do but you should not mess with working subsystems.
Simple is good but adjustable is better. Both robots had to be adjusted after falling down from the rope. One was adjustable, the other needed trial and error runs to compensate for the damage - it never found the rope again.
Better one good than two average results. We increased DC/DC converter output to 60 volts after the end of the competition and adjustable robot climbed 20% faster than the winning robot. The mechancs had to improved before it became possible. Additional tension from one rubber band was missing! Our self-locking climbing mechanism was prone to coming loose due to shocks from fast climbing. This fault would have been obvious with extra testing but lot of critical time was wasted on upgrading other robot's climbing speed from 23 to 8 seconds giving two equal robots.
Robotex 2006 - robot "volleyball"
Winner was with simplest algorithm and most stable mechanics. We participated with two robots. One never made it to the field due to catastrophic program fault and due to not having minimum required effort plan. The other robot went to the field but never moved on it due to failed battery.
Lessons learned:
We were too focused on winning and totally forgot participating. Our shooting mechanisms were most powerful by far. 6 motors out of total of 9 were engaged in aiming and shooting. We had hidden agenda of tipping over some competitors and didn't plan well on having foolproof backup plans should something fail.
Recycling presumes thorough testing. The robot happily moved for 30 minutes after the one faulty battery was removed. Simple parallel connected diodes would have saved the day.
January 2012
We discontinued offering test solutions under Karuteened. Our focus lies in electronics design and programming. Added new service for enterprises - support in case of electronical problems with manufacturing equipment.