 |
Oleme võtnud viiel korral osa iga-aastasest üritusest Robotex ja kahel korral autonoomsete robotite sumovõistlusest Baltic Robot Sumo. Robotex on tehnikahuvilistele mõeldud autonoomsete robotite võistlus ja iga aasta on uus ülesanne. Viimaste aastate valguses tundub see traditsioon rikutud olevat. Robotex 2012 - joone jälgimine (ja jalgpall)Esimene mõte oli üritust ignoreerida, sest jälle on sama ülesanne. See muutus, kui saime kastitäie äraviskamisele mõeldud arvutikomponente oma robootikahobi toitmiseks. Uuriti, et milleks see rämps ka kõlbab ja kui roboteid sai mainitud siis viskas sponsor nalja, et pangu me siis robotile nende logo ka peale, kui valmis saab. Sponsoriga robotit meil polegi varem olnud ja lubasin seepeale anda endast parima, mida selle kastitäiega teha annab. Sellest sai teha joonejälgija. Joonejälgimise ülesanne pole Robotexil uus. Sellega Robotex algas ja eelmisel aastal tegid väljamaalased puhta töö võttes kõik 3 parimat kohta endale. Joonejälgijaid on mitme tüüplahendusega, meid köitsid eriliselt protsessorivabad lahendused, sest need on tõelised "robotid igaühele". Algajal robotihuvilisel on niigi palju väljakutseid mehaanika valmistamisega ning kui sinna lisada programmeerimise lävepakk, siis sedasi tuleb uusi osalejaid suhteliselt aeglaselt peale. 2007 ülesande lahendasime me ära 3 releega. Sellel aastal on plaan kasutada siiski "analoogarvutit" kahe transistori ja fotodioodiga lahenduse asemel :) Analoogarvuti peab leidma lahendused järgmistele probleemidele:
Ülesannet annab lihtsustada järgnevalt:
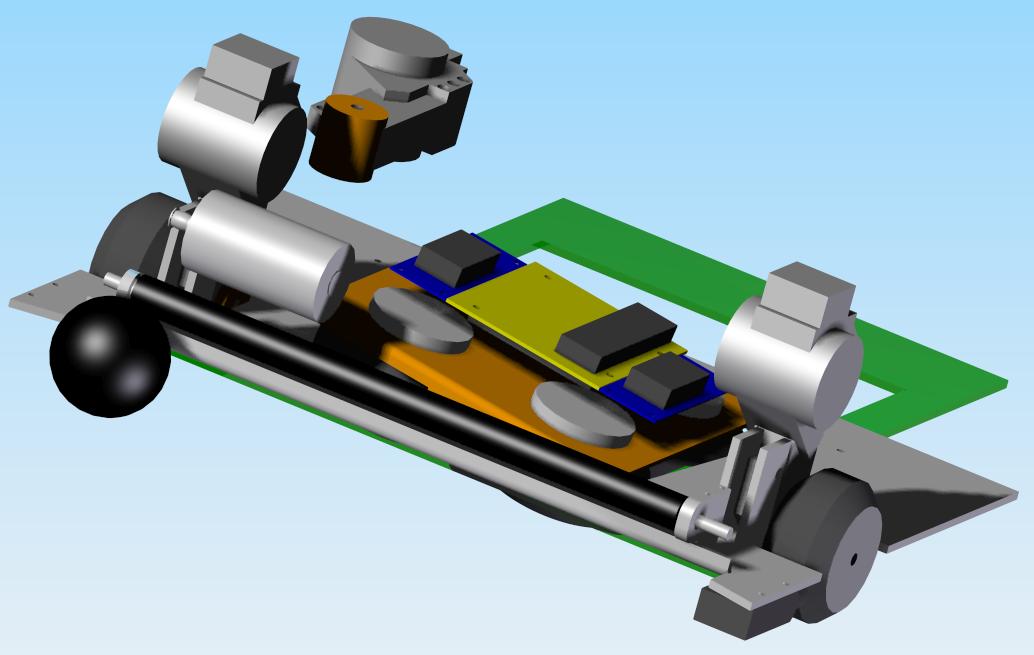
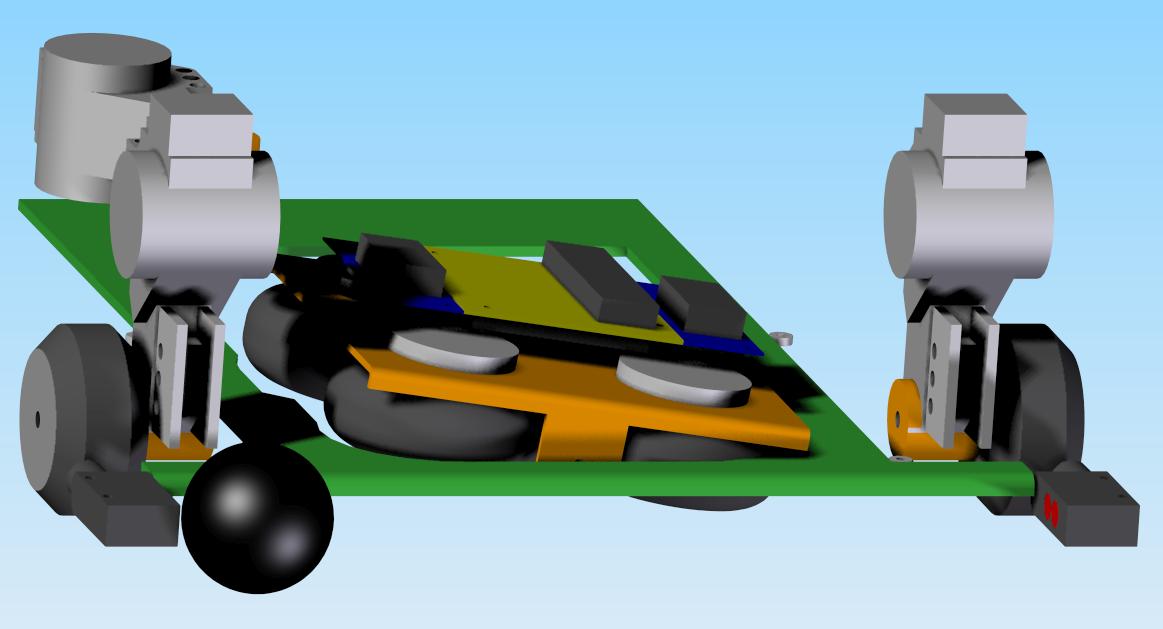
Joonel püsimineÜldiselt võib joonejälgijad jagada kaheks: 2 anduriga ja enama anduriga robotid. Viimased kasutavad tavaliselt äärmisi andureid kursi järsemaks korrigeerimiseks ning rajalt välja sõitmise korral joone viimatise asukoha tuvastamiseks. 2 anduriga on algajal robotihuviliselt tegelikult lihtsam ja odavam alustada. Mind on alati köitnud kuju muutvad robotid ja oli kindel plaan seda ka joonejälgimise juures kasutada. Kiire guugeldamine näitas, et selliseid täitsa on kasutatud ning mõni on isegi edukas olnud. Lahenduse uba on esiosas, mis suudab joont jälgida kiiremini kui roboti kere seda ise eales suudaks. Seda asendab mõnel määral ka tihe andurite riba, mida kaks ratast enda ees lükkavad. Kunst on lihtsalt juhtida neid kahte ratast nii, et andurite keskkoht jälle joont kataks. Ülesanne on võrratult lihtsam, kui juhtida on vaja vaid üht mootorit - pööramise oma - ning ülejäänud robot tuleb nagu kutsikas juhtrattale ise järele. Seega täpsem ülesanne analoogarvutile on: hoia juhtratas alati joone peal. Kahe anduri puhul tähendab see: hoia andurite signaalid võrdsed ning ratas pööratakse selle tulemusena automaatselt õigesti ja ülejäänud robot jälgib automaatselt juhtratast. Joonejälgija jaoks on vaja kahte CD/DVD lugejat ja ühte kõvaketast. Kõvaketta pea mehanism on loodud joont jälgima ning seda ülikiirelt - see on meie roboti rool. CD lugejaid on vaja liikumise mootorite ja juhtelektroonika jaoks. Kui nüüd mõelda nii, et kõvaketta pea hoolitseb selle eest, et juhtratas kunagi joonelt maha ei sõidaks, siis ainus väline tegur, mis seda teha suudab, on tsentrifugaaljõud. Seda tasakaalustab rataste hõõrdejõud. Roboti massil ei ole valemite kohaselt tähtsust. Rajalt välja paiskumise määravad ära ainult kiirus, kurvi raadius ning hõõrdetegur. Kurvi raadius on alati sama, seega joonel püsimise teine alamülesanne arvutile on kiiruse kontroll. Kõvaketta pea suudab ainult teatud ulatuses pöörelda. See määrab ära juhtratta kauguse vedavast teljest. Mõistlik on ära kasutada pea kogu dünaamiline tööpiirkond koos minimaalse varuga - näiteks et mehaanika oleks võimeline võtma välja kuni 18cm raadiusega kurve. Ristumiste ignoreerimineSee probleemi lahendamiseks on vaja, et roboti joone jälgimise osa ei jõuaks üle reageerida andurite mürale, mis paratamatult kaasneb joone ületamisel. Kui robot on mõeldud võtma 20cm raadiusega kurve, siis ristumised on kui ülijärsud kurvid, mida ei tohi jõuda jälgida selle lühikese hetke korral kui üks anduritest näeb ristumist ja teine veel ei näe. ProgrammSisenditeks on kaks andurit. Väljundiks pööramise jõud ja liikumise kiirus. Programmeerija peab saama häälestada reageerimise kiirust ning maksimum kiirust. Lihtsaimal juhul peabki arvuti viima liikumise kiiruse maksimaalseks lubatuks ja hoidma seal. Pööramine toimetab omaette reguleerides jõudu vastavalt andurite signaalide tasakaalule. Ristumise hetkel näevad mõlemad andurid musta ja peaks seega jõu jätma minimaalseks. Vahetult enne ja pärast ristumist on probleem. ElektroonikaEelnevalt kirjeldatud programmi lahendamiseks on vaja operatsioonivõimendeid ja need leiduvad CD lugejas kõik ühes mikroskeemis. Tüüpiliselt on see 4-kanaliga sildlülituses draiver, kus on 4-6 operatsioonivõimendit sisendis omavahel kombineerituna. Vaja on juhtida optiliste andurite signaalid ühe kanali sisenditesse, selle kanali väljundisse tuleb kõvaketta pea. Teine kanal läheb kahe paralleel ühenduses DC-mootori külge. Võib kasutada lihtsat pingega proportsionaalset juhtimist ning võib lisada ka kerge negatiivse takistuse juhtahelasse saamaks paremat kiirendust ja kiiruskontrolli. Skeemid tulekul. TulemusedEsimene variant kasutab BA5983FM kivi, laptopi kõvaketta pead pööramiseks, anduriteks 2x TSL257-LF Light-Voltage Converter, 3x 50F ja 2,2V superkondensaatoreid toiteks (6,6V kogupinge), 2x FF-030PK mootoreid liikumiseks. Vedavad rattad 45mm läbimõõduga polüuretaantorust kokku sulatatud rehvidega. Ülekanne 22:89. Pööramiseks kasutusel kassettmaki linti vedav rull. Reaktsiooniaeg on piiramata ja kõvaketta pea võdiseb meeletult. Üks negatiivse takistusega liikumise draiver kahele paralleelühenduses mootorile. Keskmine kiirus
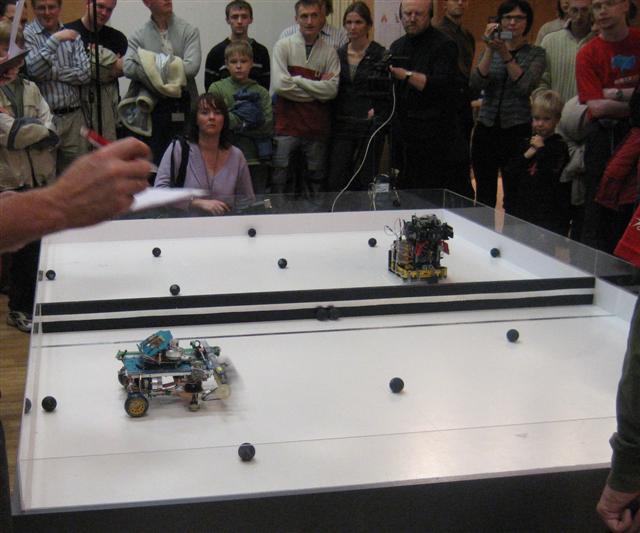
Robotex 2010 - jalgpallSee aasta oli pettumus. Igas mõttes. Ülesanne oli eelmise aasta oma, väiksed täiustused olid mõeldud vaid ülesande pilditöötlejatele sobivamaks tegemiseks. Kord on olnud, et on vabavoor, kus on teist laadi ülesanne ning põhivoor, kus võistlesid koolid, kuid seekord oli mõlemas voorus sama ülesanne, lihtsalt osalejad olid löödud tehnilise taseme järgi kaheks.
Nädal enne võistlust ärkas põhitegija üles ning ütles teistelegi, et peaks ikka minema. Parajasti midagi ees ei olnud ning terve mõistuse vastaselt sai nõus oldud. Eelmistel kordadel oli end väga hästi õigustanud põhimõte, et kui kaks nädalat enne võistlust robot valmis pole, siis me ei osalegi.
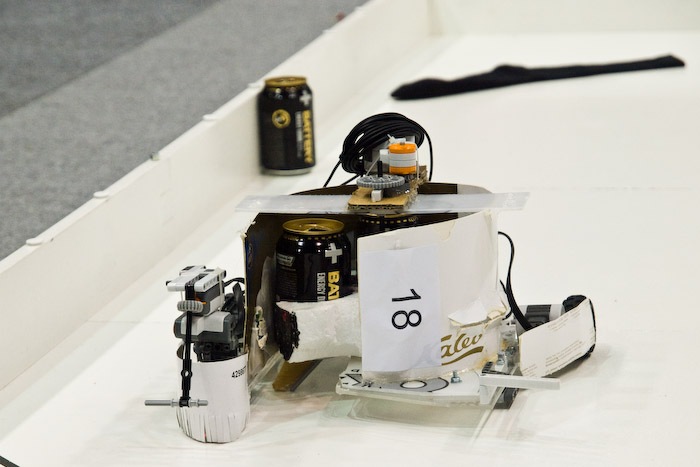
Mõnes mõttes oli see väga hea harjutus iseseisvaks eluks. Esimestel päevadel sai joonestatud roboti detailid. Järgmiseks need kokku pandud virtuaalselt. Sealt tulid tööjoonised ning materjali spetsifikatsioon. Edasi tuli materjali ning tööriistade hankimine. Oli selge, et kiire tulemuse saavutamiseks oli vaja õigeid tööriistu õige töö jaoks. Jäi üle veel detailid valmistada ning kokku panna. Vastavalt kuidas robot hakkas kuju võtma, oli aeg ka sellise pisiasjaga tegeleda, nagu palli löömise päästik ning sellest hetkest alates läks kõik käest. Palli pidi lööma kelk, mida kiirendasid 4 rulluisu ratast ning kelgu pidi rullide vahele nihutama vedru. Lähte asendisse viimiseks tuli rulluisurattad keerata kaldu ning vedru abil kelk lähteasendisse tõmmata. Polnud varem midagi sellist teinud ning tulemusena toimus vaid 1 löök 5'st ning siis ka oli löögi jõud nõrk. Aeg oli otsas. Varahommikuks läksime Robotexi saali ning proovisime paaniliselt löögimehanismist asja saada. Mingi hetk oli aeg kibe pill alla neelata ning liikumiseks programm luua. See oli sekundite mäng. Testimiseks muidugi aega ei jäänud. Väljakul üllatusime meeldivalt, et roboti mootorid liikusid juhuslikult õiget pidi ning masin isegi tegi midagi, kuid kahjuks oli löömise algoritm jäänud testimisreziimi ning liikumise algoritm täielik saast. Vastane lõi ühe oma värava ning saime edasi selles voorus. Löömise algoritm sai küll tööle, kuid kuna löömine ise kriitikat ei kannatanud, siis tegime uue löömise lahenduse. Kahjuks selle käigus läks robot oluliselt kergemaks ning raskuskese täiesti paigast ära. Testimiseks jällegi aega ei jäänud ning kuna seekord sattusime sama võimeka vastase otsa, siis peale viimast viigi vooru otsustasid kohtunikud me piinad lõpetada ja kumbki võistkond ei saanud edasi. Õppetunnid:
Robotex 2009 - jalgpall
|
.jpg)
sügis 2012
jaanuar 2012
detsember 2010 |